Introduction:
Industrial robots are commonly used in automated manufacturing processes, which require complex movements and high precision. Supporting structures must withstand the cyclic loads generated by the moving robots to ensure accurate manufacturing precision and to prevent unexpected production stops. Simulation allows us to find failure prone regions and to set appropriate measures to reach the desired life span.
Challenge:
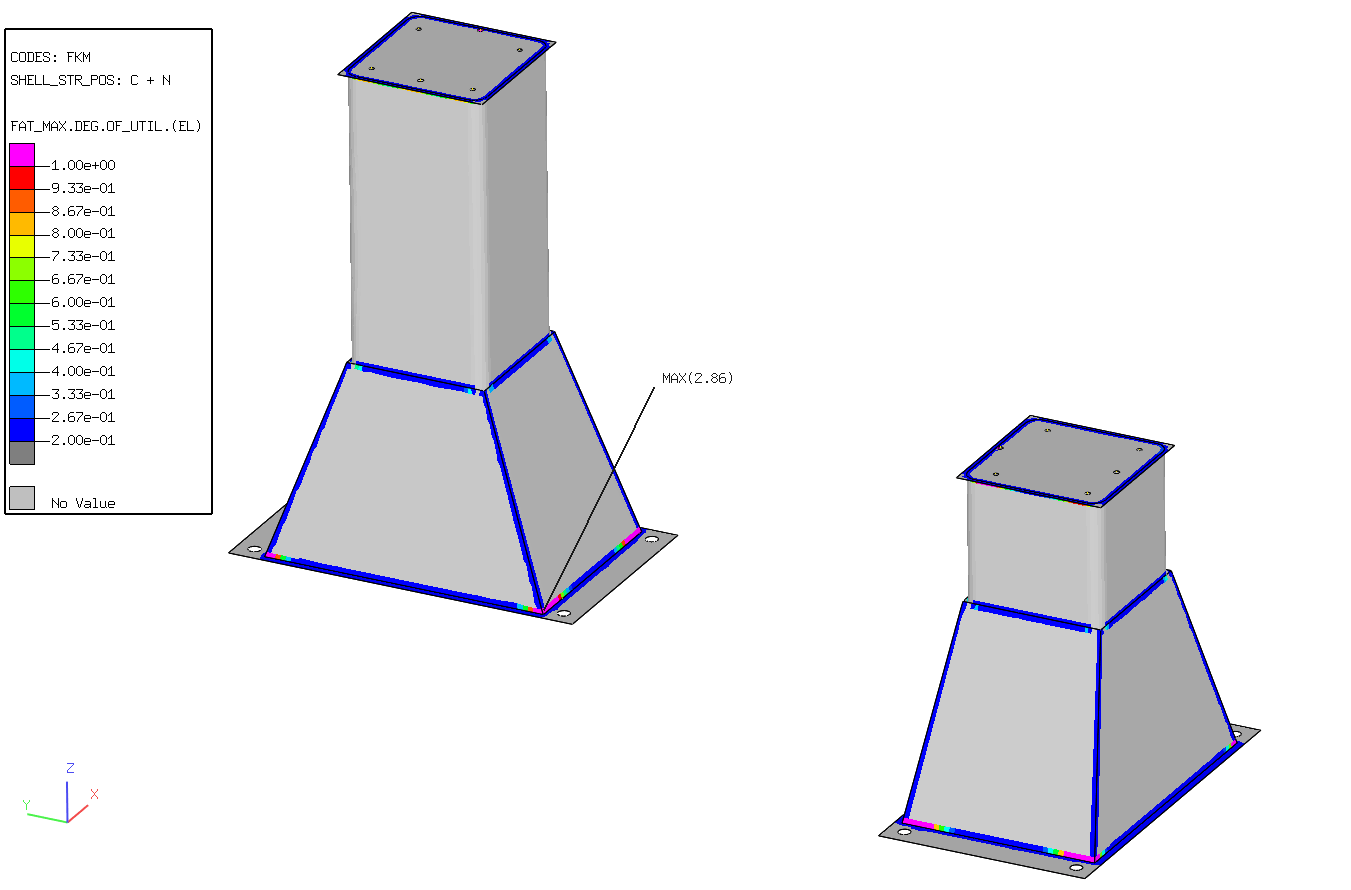
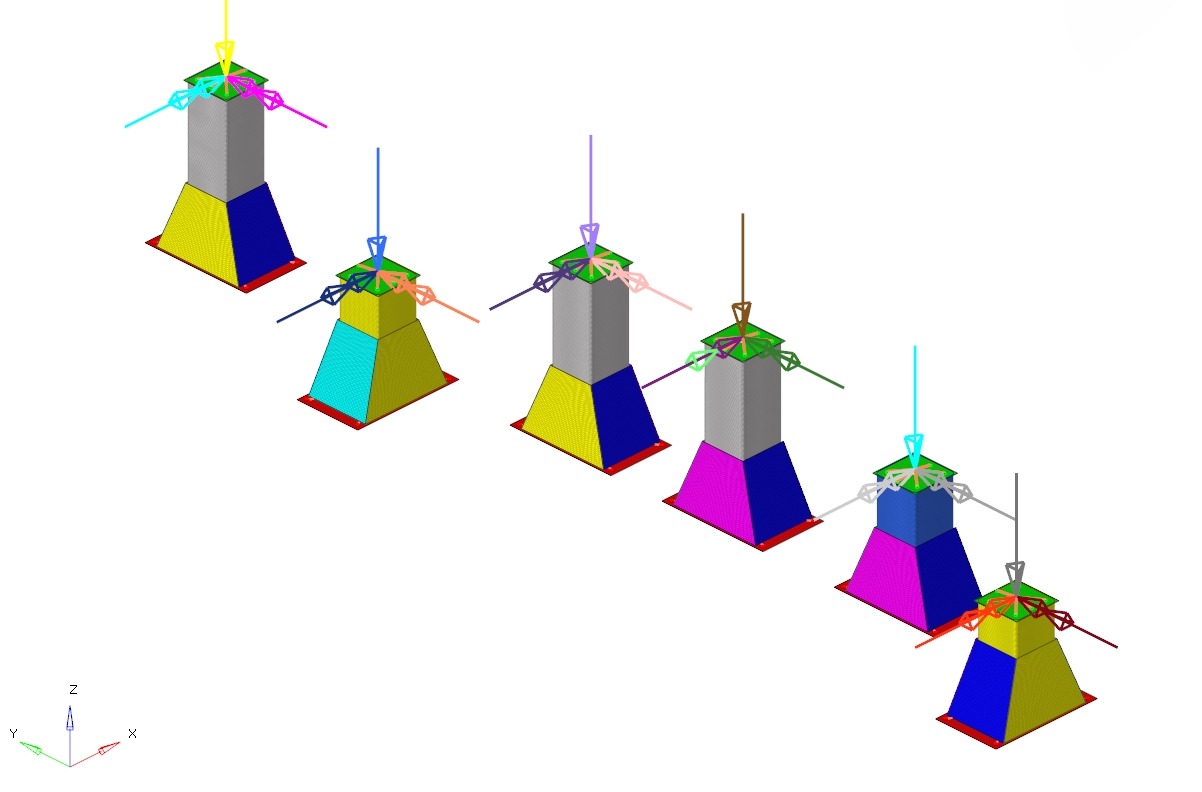
Strength assessment of the welds of six consoles, each supporting one industrial robot, is required. As the movements are different for each robot, each console is experiencing a unique cyclic load sequence. Furthermore, the consoles are of different sizes and orientation.
The FE-Model is loaded with unit forces and unit moments at the mounting plate of each console, resulting in 36 distinct load steps. A separate multibody simulation of the robots is used to calculate the magnitudes of the forces and moments in each direction during a movement period for each console. As a result, 36 distinct time sequences are available. Using LIMIT, the FE-results can be individually scaled according to the time response data to calculate the unique degrees of utilization for the welds at each console.
Advantages of using LIMIT:
- Automatic weld detection finds all identical welds in the FE-Modell to minimize the effort of weld setup definition. Only a few different weld setups need to be defined.
- LIMITs load manager enables the user to individually scale and combine FE-results. Even complex time sequence data can be imported via .csv-files.
- LIMIT-Viewer allows for extensive post processing. Welds can be queried to separately show the degree of utilization of the weld root and the weld toes.
- Automatic report generation minimizes the effort of documenting the strength assessment.