Einleitung:
Industrieroboter werden in automatisierten Fertigungsprozessen eingesetzt und bieten komplexe Bewegungsabläufe in Kombination mit hoher Positioniergenauigkeit. Die Lagerung der Roboter sollte neben ausreichender Steifigkeit auch entsprechende Festigkeit aufweisen, um einen störungsfreien Betrieb zu gewährleisten. Hohe Zyklenzahlen, die meist in relativ kurzer Zeit zustande kommen, erfordern spezielle Untersuchungen hinsichtlich Ermüdungsfestigkeit. Die Simulation mittels der Methode der Finiten Elemente und die anschließende Bewertung mit LIMIT ermöglicht eine effiziente Analyse und Nachweisführung.
Herausforderungen:
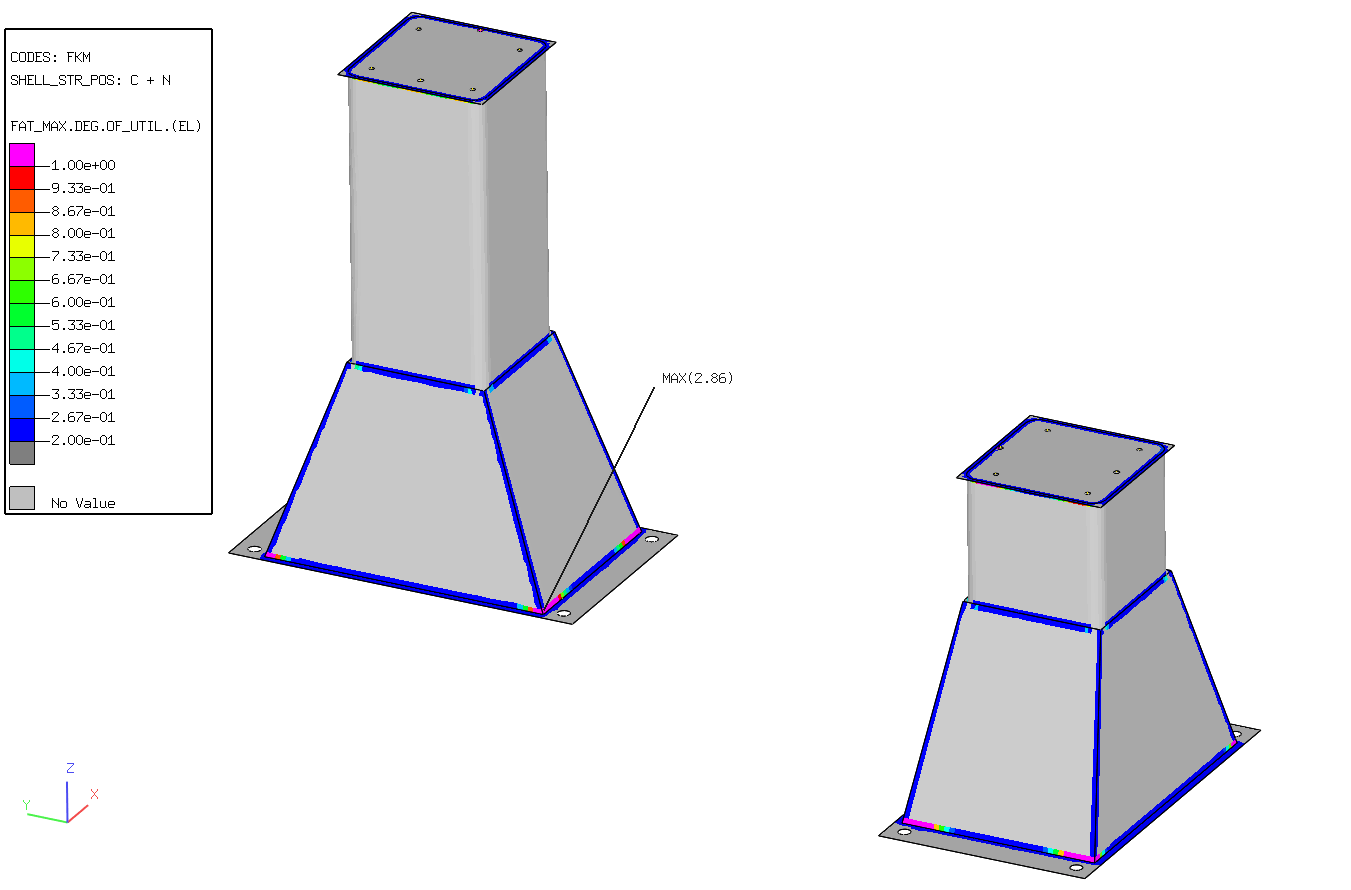
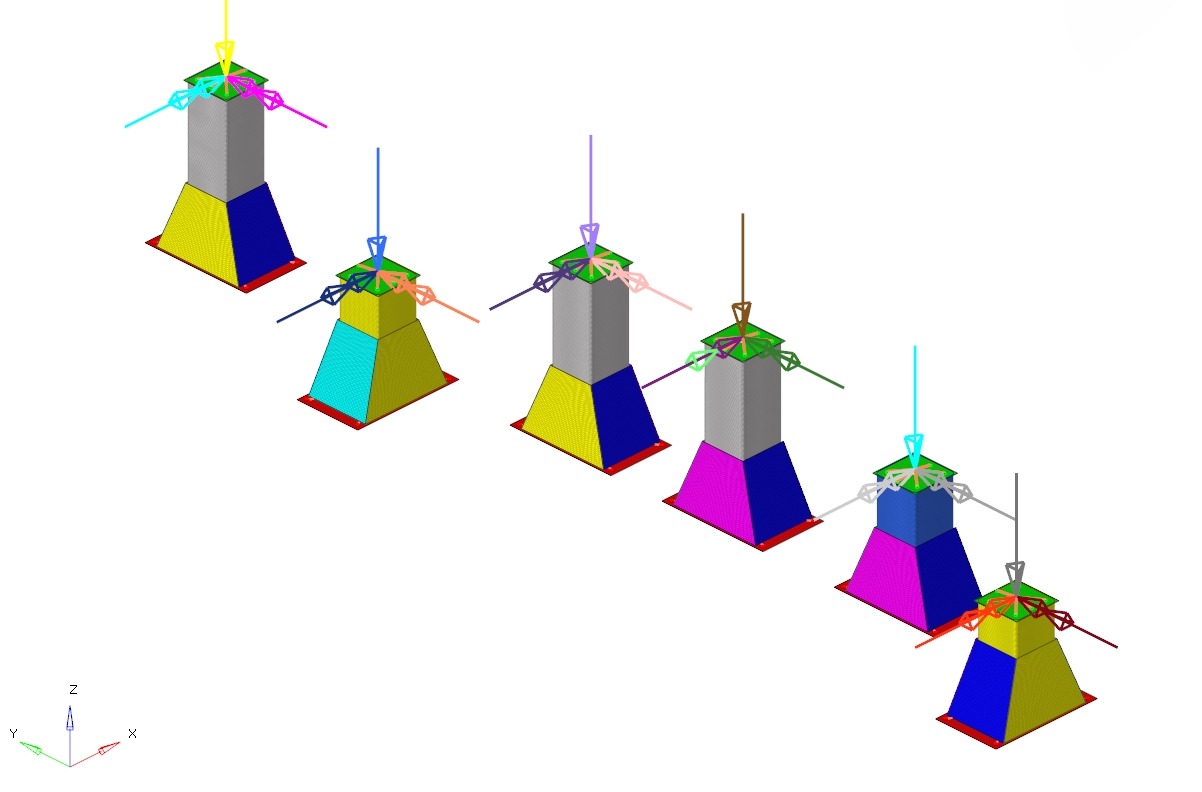
Auf einer Rahmenstruktur sind sechs Industrieroboter über Konsolen gelagert. In der Abbildung sind aus Gründen der Geheimhaltung nur die Konsolen zu sehen. Jeder Roboter wiederholt einen speziellen Bewegungsablauf. Die Phasenlage zwischen den einzelnen Robotern ist jedoch unbekannt und kann durch Ereignisse wie Störungen verändert werden. Aus der Regelungstechnik der Roboter sind die Reaktionskräfte und Momente in den Flanschebenen bekannt. D.h. für jeden Roboter liegt der zeitliche Verlauf der drei Lagerkräfte und Momente vor.
In einer Finiten Elemente Berechnung wird die Struktur mit jeweils nur einer Einheitslast bzw. einem Einheitsmomenten belastet und somit 36 Ergebnisdatensätze generiert. Für einen speziellen Roboter kann durch Überlagerung der sechs Spannungsdatensätze, die durch den zeitlichen Verlauf der drei Kräfte und Momente gewichtet werden, der zeitliche Verlauf der Beanspruchung der Struktur zufolge eines einzelnen Roboters bestimmt werden.
Um den Effekt der unbekannte Phasenverschiebung der Roboter zu erfassen, bietet die FKM-Richtlinie einen eleganten Ansatz zur Behandlung nichtproportionaler Lasten. Jeder Roboter stellt dabei die Quelle einer nichtproportionalen Beanspruchung dar. Die kombinierten Auslastungen an der Struktur, die für jeden Roboter einzeln berechnet werden, werden im Anschluss aufaddiert und ergeben somit eine effiziente und konservative Gesamtauslastung. Eine aufwändige Untersuchung der gegenseitigen Beeinflussung der Roboter kann dabei entfallen.
Vorteile im Einsatz von LIMIT:
- Automatisches Auffinden aller Schweißnähte und einfache Zuweisung der Nahteigenschaften.
- Verarbeitung von MKS-Daten bzw. Messreihen auf Basis von .csv-Dateien zur Abbildung von zeitlichen Verläufen der Lasten.
- Elegante und effiziente Abbildung von nichtproportionalen Beanspruchungen bzw. Lastgruppen entsprechend der FKM-Richtlinie.
- Detaillierte Darstellung der Bewertungsergebnisse für Nahtwurzel, Nahtübergang und Grundmaterial
- Schnelle Erstellung eines Berichts mittels Report Generator.